При воздействии внешней нагрузки, температуры, осадки опор и др. любое инженерная конструкция может изменять свою форму, а его точки при этом будут перемещаться.
ΔA, (ΔxA, ΔyA) – линейные перемещения, φA – угловым перемещением.

Виды перемещений
Методы определения перемещений основаны на определении работ внешних и внутренних сил. В строительной механике рассматриваются два вида таких работ – действительные и возможные работы.
Действительным перемещением называется перемещение, вызванное силой по направлению ее действия.
В упругих системах перемещение Δ прямопропорционально действующей силе (закон Гука):
Δ=δP,
где коэффициент δ называется податливостью.

Перемещение
Действительной работой называется работа силы на ее действительном перемещении.

Возьмем определенный интеграл от этого выражения в пределах изменения силы от нуля до конечного значения:

Эта формула определяет теорему Клапейрона: сила, действующая на упругую систему, совершает работу, равную половине произведения силы на перемещение.
В реальных конструкция направление действия какой-либо силы Р может не совпадать с направлением вызванного ею перемещения. Так как любая работа равна произведению силы на путь, пройденный по направлению этой силы, то в качестве перемещения Δ принимают проекцию действительного перемещения точки приложения силы на направление вызвавшей это перемещение силы.
Если в место силы на конструкцию воздействует сосредоточенный момент М, величиа работы определяется аналогично. Для момента в качестве перемещения соответствует угол поворота.


Перемещение
Для равномерно распределенной нагрузке в качестве перемещения соответствует площадь эпюры перемещений на участке действия нагрузки.
При воздействии на инженерную конструкцию группы внешних сил работа этих сил равна половине суммы произведений каждой силы на величину соответствующего ей перемещения, вызванного действием всей группы сил.

Перемещение

Знак минус перед последним членом выражения принят поскольку направление угла поворота υ2 поперечного сечения балки, в котором приложен момент М2, противоположно направлению этого момента.
В идеально-упругой системе предполагается, что работа внешних сил А полностью переходит в потенциальную энергию деформации U:
А =U.
Если убрать внешние силы, упругая система возвратится в исходное положение. Эту работу совершают внутренние силы. Так как работа внешних сил W всегда положительна, то работа внутренних сил V будет отрицательной:
А=–V.
Определим работу внутренних сил плоской стержневой системы:

Работа внутренних усилий
Работа продольной силы N:
![]()
где E – модуль Юнга, F – площадь сечения, EF – жесткость на растяжение.
Работа изгибающего момента М:
![]()
где I – момент инерции сечения, EI – жесткость на изгиб.
Работа поперечной силы Q:
![]()
где μ– коэффициент формы сечения, GF – жесткость на сдвиг.
Исходя из принципа суперпозиции:

Если проинтегрировать это выражение по всей длине элемента l и учесть наличие в системе n стержней, получим выражение потенциальной энергии всей стержневой системы:
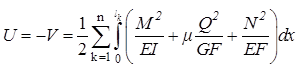
Расчеты показывают, что для системы, работающей на изгиб, первый член последней формулы составляет – порядка 96%, второй – около 1%, третий – около 3%.